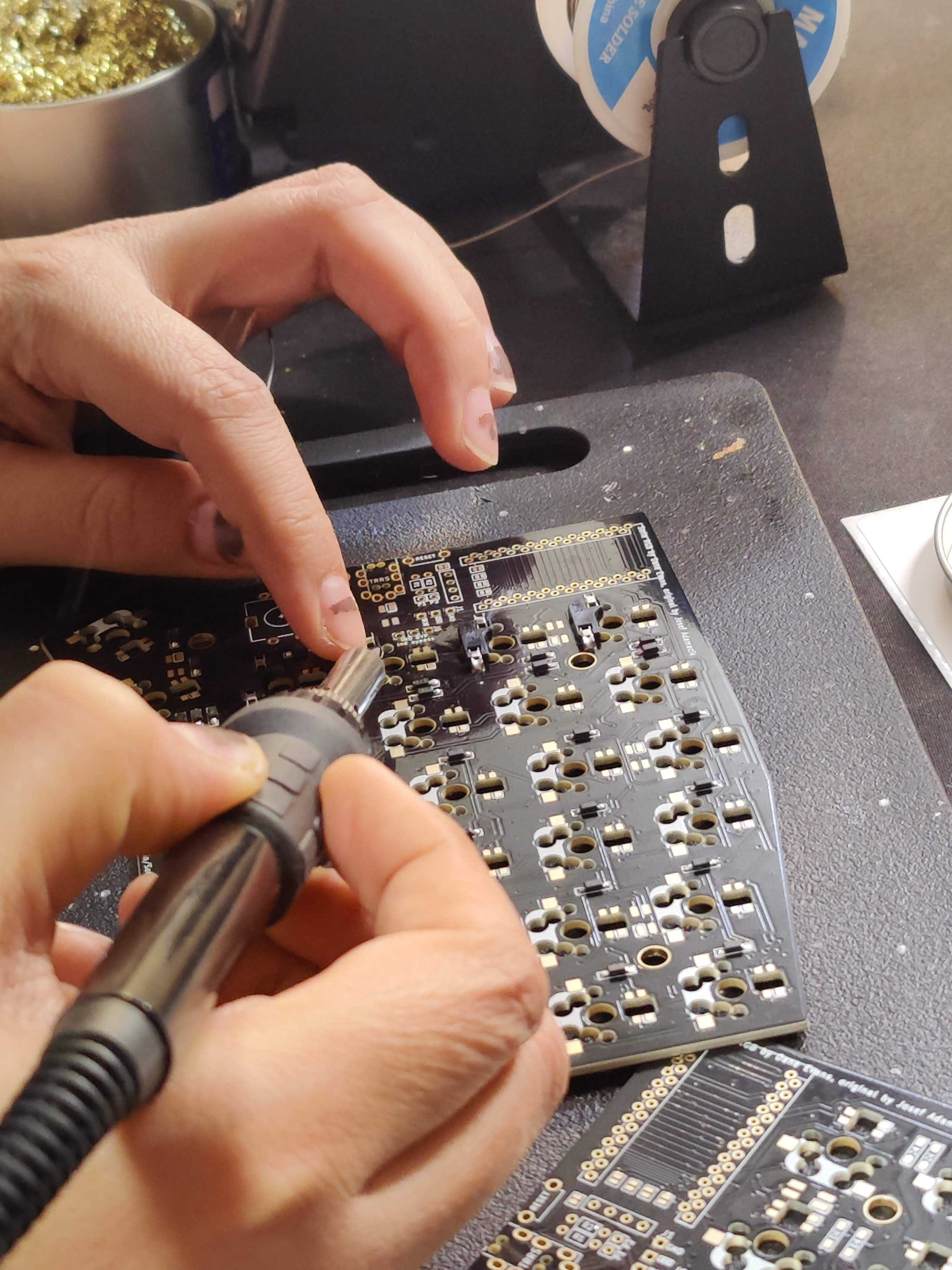
work iNeRF Inverting Neural Radiance Field for Pose Estimation Depth Fusion for Large Scale Environments Implementation of Spatial Hashing in OpenCV RGBD Visual SLAM for Quadrotors in Indoor Environments Built a quadrotor that can map and localize itself in a static GPS denied environment. Mobile Inverted Pendulum Robot Built a MIP robot and implemented a PI-PD controller. The robot used stepper motors, and was controlled via an arduino. The robot also included a visual system, which allowed it to follow white lines, and detect faces. fun Building the Sofle Keyboard My log of building the sofle keyboard v2