Akash Sharma
Research Scientist @ Amazon FAR • Be curious always 🔭

San Francisco, CA, United States
Hey there!
I am a research scientist at Amazon Frontier AI & Robotics (FAR) where I work with Jitendra Malik. I received a Ph.D. from Carnegie Mellon University Robotics Institute (RI) advised by Prof. Michael Kaess. During my Ph.D. I was also a visiting researcher at FAIR, Meta with the FAIR Robotics team, where I closely worked with Mustafa Mukadam and Francois Hogan.
My research currently focuses on robot perception using varied sensing modalities such as vision and touch to enable dexterous manipulation. I am also broadly interested in state estimation and reconstruction in dynamic environments. I graduated with a Masters in Robotics from CMU (Thesis) where I worked on Object SLAM for robot navigation. Before joining CMU, I was briefly a Software Engineer at Infinera. I have a Bachelor’s degree in Electronics and Communication from Sri Jayachamarajendra College of Engineering (SJCE).
I’m a ![]() enthusiast, my lua configuration is available here. I also enjoy bouldering, running and mechanical keyboards. and I currently use a custom built keyboard Sofle Keyboard.
enthusiast, my lua configuration is available here. I also enjoy bouldering, running and mechanical keyboards. and I currently use a custom built keyboard Sofle Keyboard.
news
| Feb 22, 2026 | |
|---|---|
| Feb 02, 2026 | Started at Amazon FAR as a Research Scientist, working on robot hands. |
| Jan 30, 2026 | Irmak’s paper AINA | Dexterity from Smart Lenses was accepted at ICRA 2026! Checkout the code at website. |
| Jan 13, 2026 | I defended my Ph.D. thesis! I’m officially a doctor! |
| Aug 01, 2025 | |
| Aug 01, 2025 | |
| Apr 11, 2025 | I have passed my Ph.D. thesis proposal, and I’m officially a Ph.D. candidate now! |
| Apr 11, 2025 | Gave an invited talk titled “Self-supervised perception for tactile dexterity” at the Neuroagent Lab, CMU. |
| Apr 10, 2025 | Our paper “DexterityGen: Foundation controller for Unprecedented Dexterity” was accepted at RSS 2025! |
| Sep 04, 2024 | Our paper “Sparsh: Self-supervised touch representations for vision-based tactile sensing” was accepted at CoRL 2024! |
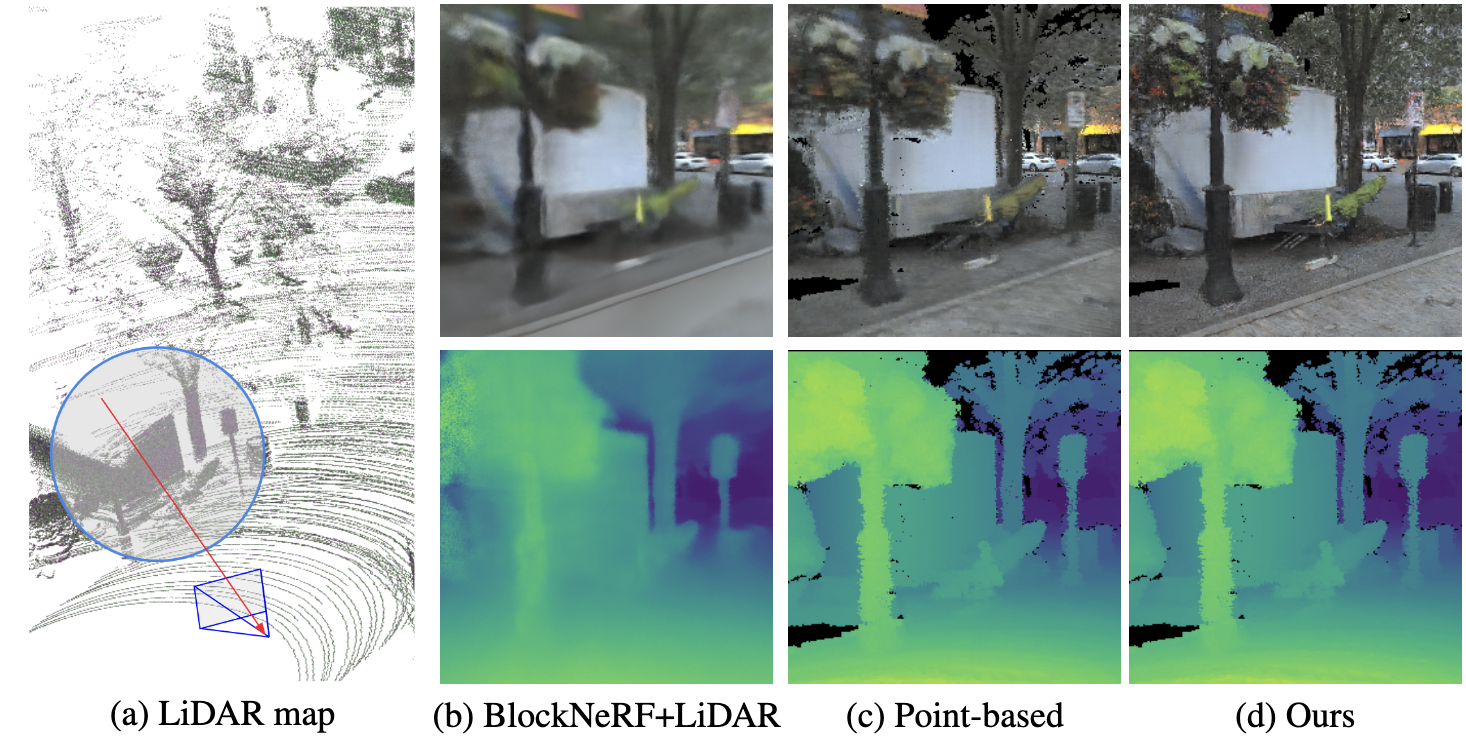
| Jul 14, 2023 | “Neural Radiance Fields with LiDAR Maps” accepted at ICCV 2023 |
| Apr 27, 2023 | I will join as a Visiting Researcher at Meta (Facebook) FAIR from Fall ‘23. |
| Nov 09, 2022 | I gave a guest lecture on Dense representations for SLAM for 16833 - Robot Localization and Mapping @ CMU |
| Dec 13, 2021 | Checkout this collection of awesome object SLAM papers and resources: https://github.com/520xyxyzq/awesome-object-SLAM |
| Dec 13, 2021 | I will be interning this summer of ‘22 @ Meta (Facebook) Reality Labs. |
| Dec 13, 2021 | Tarasha and I won two DSLRs (Nikon D3500) for our Computational Photography Course Project Presentation. (Course Page) |
| Nov 01, 2021 | Reviewing for ICRA 2022 |
| Aug 01, 2021 | Starting Ph.D. in Robotics at CMU |
| May 13, 2021 | Interning @ Fyusion over the summer of 2021! |
| May 01, 2021 | Graduated MS in Robotics (thesis) |
| Feb 01, 2021 | “Compositional and Scalable Object SLAM” accepted at ICRA 2021 |
| Dec 01, 2020 | Reviewing for ICRA 2021 |
publications
- CoRL
- M.S.